Autonoom mest injecteren
Robottechniek sleutel tot een betere bodem
Het inzetten van robottechnologie in de landbouw kent, naast de geijkte voordelen als besparing in arbeid, meer capaciteit en lagere kosten, nog een significante plus. Het heeft namelijk potentie om de bodemdruk te reduceren en daarmee de kwaliteit te verbeteren. In Flevoland is een consortium actief met die filosofie als doel. Het idee is om een autonoom werkende mestrobot te bouwen die slim bemest en bodem spaart.
Melkveehouder Gerrit van den Pol uit Dronten staat voor een uitdaging: hij zoekt voor zijn bedrijf een mesttank die een hoge capaciteit, maar weinig bodemdruk heeft. De veehouder bemest veel opnieuw ingezaaid grasland, waar het voorkomen van insporing en bodemverdichting essentieel is. Capaciteit en weinig gewicht gaan lastig samen. Zo werd het idee van een slimme (be)mestrobot geboren.
2018
deadline
Consortium autonome mesttank
Met zijn idee klopte Van den Pol aan bij Corné Kocks, lector Precisielandbouw bij Aeres Hogeschool Dronten. Het idee van de autonome bemester bleek een prachtig studieobject. Echter, dat vraagt om kennis van machinebouw en robottechnologie. Daarvoor werd aangeklopt bij machinebouwer Veenhuis en roboticaspecialist Precision Makers. Met medewerking van Veenhuis-directeur Walter Veenhuis, en Allard Martinet van Precision Makers, werd een consortium opgericht. Daar heeft zich ook een tweede melkveehouder, Mark Havermans uit Noord-Brabant, bij aangesloten. Het doel: eind 2018 een autonoom werkende en slimme bemestingsrobot in het veld hebben rijden.
Beginnen vanuit de praktijk
'Het consortium is een smeltkroes van expertises', zo vat Kocks het samen. 'Het beste ben je af met een praktijksituatie. Kinderziektes zijn zo direct te tackelen. Eerst is een eisenpakket samengesteld, waarna knelpunten worden vastgesteld die bedrijven individueel moeten oplossen.'
'Robotisering haalt zijn kracht uit herhaalwerkzaamheden', aldus Martinet. 'Denk aan las-, melk- en voerrobots. De uitdaging is om dit bij mestinjectie toe te passen. De ultieme wens is een machine die zuinig op de bodem is. Dat komt voort uit een combinatie van een laag gewicht en de juiste bandencombinatie. De volgende stap is plaatsspecifiek bemesten met behulp van NIR-sensoren en precisielandbouw. Een robot is niet veelzijdig. Hij kan niet met 30 verschillende machines werken, zoals een trekker dat wel kan. Wellicht moet bij de eerste versie nog een persoon aanwezig zijn. Die kan dan meerdere robots controleren.'
Bekende componenten
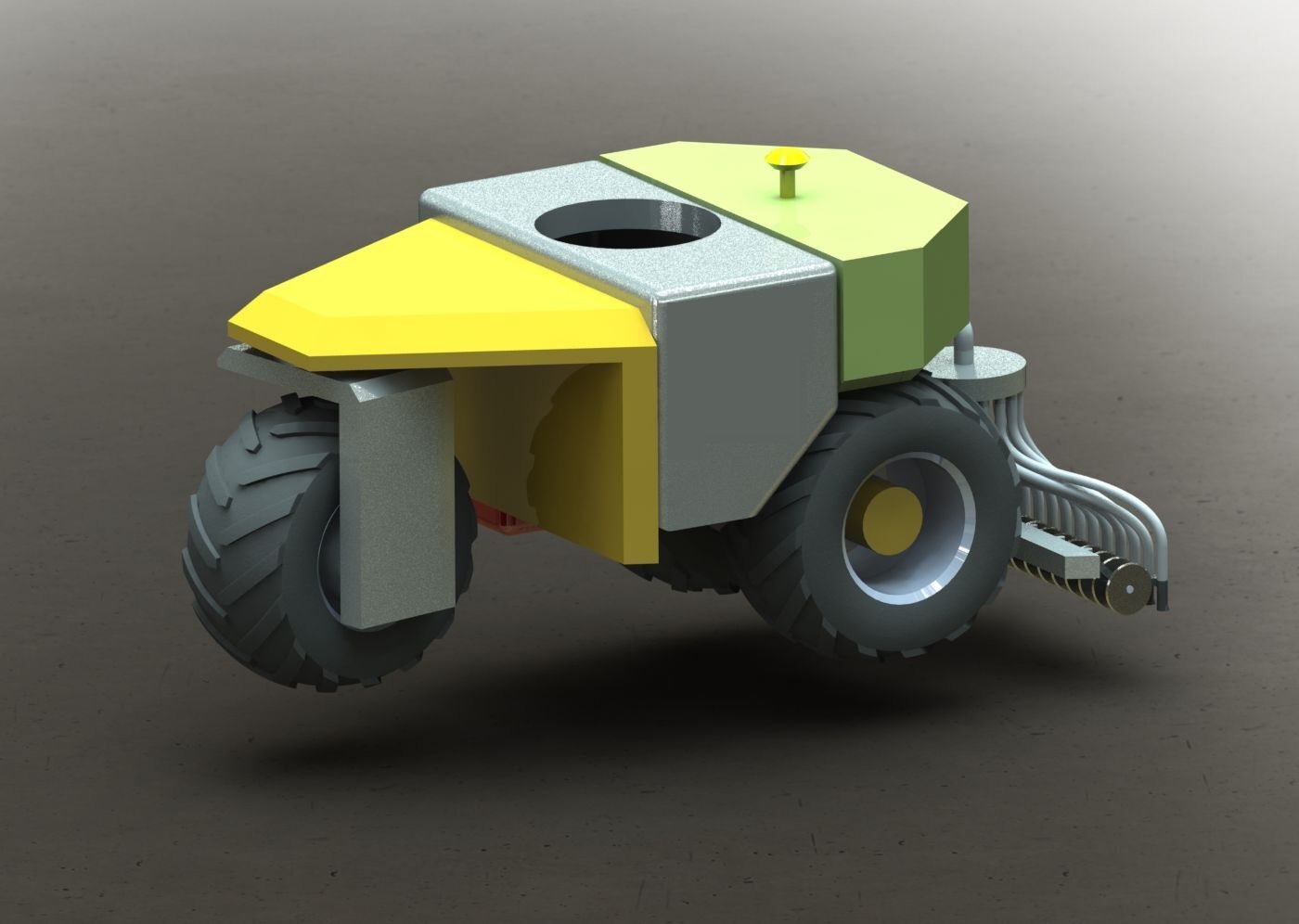
Hoe ziet de robot er concreet uit? Op de tekentafel gaat het om een driewieler met lagedrukbanden, een tank van circa 5 kuub en een bemester van 3 meter breed. Voor versie 1.0 wordt gebruik gemaakt van bekende componenten, zoals een dieselmotor en hydrostatische aandrijving. Elektromotoren en zonne-energie zijn toekomstmuziek.
Veenhuis: 'Drijfmest uitrijden is een lastige klus, omdat je grote volumes moet vervoeren. Vloeibare kunstmest gebruik je in veel kleinere hoeveelheden. De robot vult zich automatisch bij een vulstation op de kopakker of op het erf. Daarbij is het transport van groot belang. Als fabrikant kijken we ook naar het commerciële succes. In onze opinie heeft de robot potentie om internationaal gebruikt te worden. Door meerdere robots 24 uur per dag te laten werken, kun je een hoge capaciteit halen. Voor loonwerkers is het interessant. Zij kunnen zich volledig op het mesttransport richten. De robots rijden het uit.'
Pad planning
Naast de hardware staat ook de software een gigantische klus te wachten. Dat is een taak voor Martinet en Precision Makers: 'Slim mest uitrijden, betekent slim vullen en je ideale route bepalen. Dat noemen we pad planning. De machine rijdt rondjes (loops) over het veld en probeert zo min mogelijk meters af te leggen. Een voorbeeld: Misschien is het wel gunstiger om de tank niet volledig te vullen of, om in verband met de perceelslengte, slechts de halve werkbreedte te bemesten. Je praat over kunstmatige intelligentie. Voor een mens is dat gesneden koek, maar voor robots gigantisch complex. Als chauffeur maak je continue beslissingen. Ieder op zijn eigen manier.'
'Een nadeel is dat de menselijke chauffeur ook de verkeerde beslissingen neemt', vult Veenhuis aan. 'Doorrijden in een natte plek, waardoor hij vast kom te zitten. Door op basis van sensoren beslissingen te nemen, kun je veiliger werken. Daar werkt de auto-industrie ook aan.' Volgens de betrokkenen is een sleepslangsysteem daarom niet mogelijk. Die werkwijze is nog complexer. Van den Pol ziet dit uit het oogpunt van de bodemdruk ook niet zitten, omdat een zware combinatie vereist is voor de trekkracht. Die loopt op tot wel 8 ton.
Veiligheid geen hindernis
Een ander punt, dat hoog op de agenda van robottechnologie staat, is veiligheid. Voor landbouwtoepassingen is hier gemakkelijker aan te voldoen dan bij zelfrijdende auto’s. Op juridisch vlak en verzekeringstechnisch verwacht Martinet geen issues. 'De mestrobot werkt op eigen terrein, dat maakt het gemakkelijker. Wel moeten we beslissingen nemen over hoeveel menselijke inmenging vereist is. Alles valt of staat met de pad planningsoftware. Als basis gebruiken we rtk-gps. Dat is betrouwbaar genoeg. Vooraf worden de perceelscontouren ingeladen, zodat de grenzen bekend zijn. De vraagstukken liggen vooral bij de software. Het bouwen van een prototype kan relatief snel verlopen. Het voortraject is relatief lang.'
Tests in 2018
Vanuit de fabricage ziet Veenhuis echter flink wat werk liggen voor de engineering. Wanneer het concept is uitgewerkt, en de pad planning gereed is, kan een prototype worden gebouwd. In 2018 wordt daarmee getest, zodat eind volgend jaar de resultaten bekend zijn en de machine zijn volgende fase inrolt. Bewust wordt alleen naar drijfmest gekeken. 'In de toekomst kan dit wellicht ook voor vaste mest werken', denkt Veenhuis. 'We trekken het project bewust niet te breed, anders duurt de ontwikkeling nog langer. Voor een prijskaartje is het te vroeg, maar de kosten van het ontwerp en de kosten per kuub mest houden we scherp in de gaten. Voordelen voor de bodem zijn echter lastig in geld uit te drukken.'
Toekomstvisie
Lector Kocks heeft al een toekomstvisie voor ogen: 'Versie 1.0 is de standaard machine volgens bekend concept: Dieselmotor, hydrauliek en bemester. Versie 2.0 werkt energie neutraal en in versie 3.0 maken we gebruik van bio based composiet om de machine van te bouwen. Als krachtbron wordt dan misschien wel zonne-energie of waterstof gebruikt.'


Niels van der Boom
© DCA Market Intelligence. Op deze marktinformatie berust auteursrecht. Het is niet toegestaan de inhoud te vermenigvuldigen, distribueren, verspreiden of tegen vergoeding beschikbaar te stellen aan derden, in welke vorm dan ook, zonder de uitdrukkelijke, schriftelijke, toestemming van DCA Market Intelligence.